《自动驾驶L5级:技术瓶颈何在?突破路径在哪?》
一、引言
自动驾驶技术是汽车工业乃至整个交通行业的一场革命性变革。其中,L5级自动驾驶被认为是完全自动驾驶的最高级别,即车辆能够在任何情况下无需人类干预完成驾驶任务。尽管L5级自动驾驶的愿景令人兴奋,其实现却面临诸多技术瓶颈。
二、L5级自动驾驶的技术要求
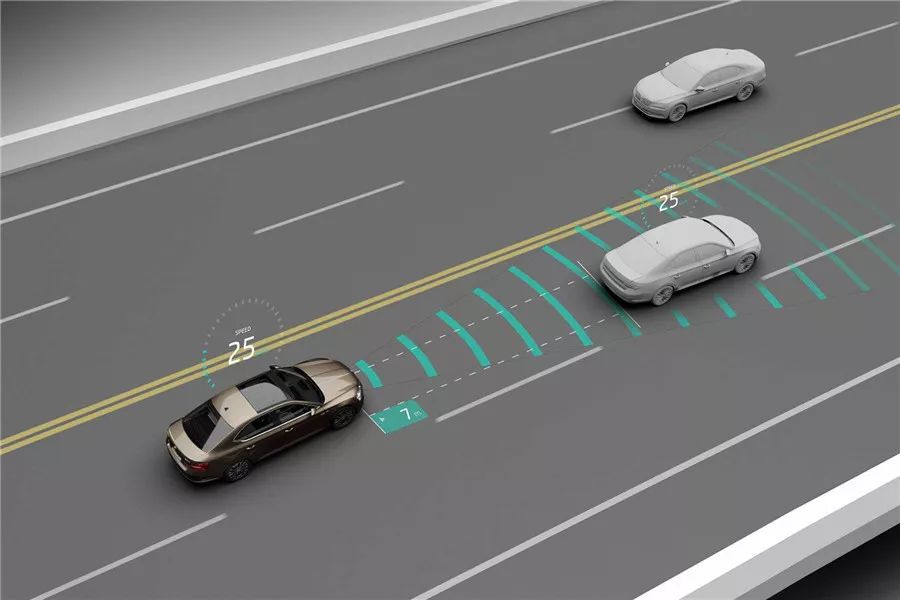
L5级自动驾驶要求车辆具备高度的环境感知能力、精确的路径规划能力和强大的决策执行能力。在环境感知方面,车辆需要能够准确识别道路上的其他车辆、行人、交通标志等,并且在复杂的天气条件下保持良好的感知效果。路径规划能力要求车辆能够根据实时交通状况和目的地信息制定最优行驶路线。决策执行能力则决定了车辆如何应对突发情况,如紧急刹车或避让障碍物等。
三、当前技术瓶颈
(一)环境感知方面的挑战
1. 复杂天气条件下的感知准确性
在恶劣天气下,如雨雪雾霾等,传统的传感器如摄像头和雷达可能会受到干扰,导致感知不准确。例如,在大雾天气中,摄像头可能无法清晰地捕捉到前方的物体,而毫米波雷达虽然可以在一定程度上穿透雾气,但其分辨率较低,难以精确识别物体的具体形状和位置。激光雷达虽然具有较高的分辨率,但在强光环境下也可能出现“鬼影”现象,影响感知效果。
2. 对微小物体的检测
对于一些体积较小的物体,如电线杆、路缘石等,现有的传感器可能难以准确检测到它们的存在。这可能导致车辆在接近这些物体时发生碰撞事故。特别是在城市环境中,道路基础设施复杂多样,微小物体的检测成为一大难题。
3. 区分相似物体
在某些情况下,不同类型的物体可能会呈现出相似的外观特征,给车辆的识别带来困难。例如,垃圾桶与路缘石在外观上可能存在相似之处,如果车辆无法准确区分这两种物体,就可能误判并采取错误的操作。
(二)路径规划中的问题
1. 实时数据获取与处理
为了实现高效的路径规划,车辆需要从多个来源获取实时数据,包括交通信号灯状态、道路施工信息以及周围车辆的位置和速度等。这些数据往往来自不同的渠道,且格式各异,需要进行统一整合和处理才能用于路径规划。同时,由于网络延迟等因素的影响,获取到的数据可能存在一定的滞后性,这会影响路径规划的质量。
2. 应对突发事件的能力
在实际驾驶过程中,可能会遇到诸如交通事故、自然灾害等情况,这些突发事件会导致道路状况发生变化。车辆需要具备快速响应和调整路径的能力,以确保行驶安全。目前大多数路径规划算法在面对突发事件时表现不佳,容易陷入困境或者做出错误的选择。
(三)决策执行中的挑战
1. 突发事件的应对
在驾驶过程中,车辆可能会遇到各种突发事件,如突然出现的行人闯入马路、动物横穿道路等。对于这些突发事件,车辆需要迅速做出反应并采取适当的措施。现有的决策算法在处理突发事件时存在一定的局限性,可能会导致车辆做出错误的决策,从而引发交通事故。
2. 与其他车辆的协作
在多车场景下,车辆之间的协作至关重要。车辆需要与其他车辆共享信息,以便协调行动,避免碰撞。目前车辆之间的通信技术还不够成熟,存在信息传输延迟等问题,这影响了车辆之间的协作效果。
四、突破路径
(一)提升环境感知技术
1. 多传感器融合
通过将多种传感器(如摄像头、雷达、激光雷达等)进行融合,可以弥补单一传感器的不足,提高环境感知的准确性。例如,利用摄像头的优势识别交通标志和车道线,结合雷达和激光雷达的数据进行物体检测和跟踪。这种多传感器融合的方法已经在一定程度上取得了较好的效果,但仍需进一步优化融合算法,以提高整体性能。
2. 利用人工智能技术
采用深度学习等人工智能技术对传感器数据进行分析,可以提高车辆对复杂环境的理解能力。例如,使用卷积神经网络(CNN)对摄像头图像进行处理,提取出关键特征;使用循环神经网络(RNN)对雷达和激光雷达数据进行建模,预测物体的运动轨迹。这些技术的应用有助于增强车辆的感知能力,使其更好地适应各种路况。
3. 增强微小物体和相似物体的检测能力
针对微小物体和相似物体的检测问题,可以通过改进算法和增加训练样本来提高检测效果。例如,在训练模型时加入更多关于微小物体和相似物体的数据,使模型能够更好地识别这些物体。还可以利用先验知识辅助检测过程,例如根据道路类型推测可能出现的物体种类,从而提高检测精度。
(二)改进路径规划算法
1. 实时数据处理与预测
开发更加高效的数据处理和预测算法,以应对实时数据获取与处理的需求。例如,采用分布式计算架构,将数据处理任务分配到多个节点上,提高处理速度;利用机器学习方法预测未来一段时间内的交通状况,为路径规划提供更准确的信息支持。
2. 提升突发事件应对能力
研究新的路径规划算法,使车辆在面对突发事件时能够更快地调整路径并采取适当的措施。例如,引入博弈论思想,模拟不同参与者之间的互动关系,预测他们可能的行为模式;结合强化学习技术,让车辆在不断试错的过程中逐渐掌握应对突发事件的最佳策略。
(三)优化决策执行系统
1. 完善突发事件应对机制
加强对突发事件的研究,完善车辆的应对机制,使其能够在各种情况下都能安全可靠地运行。例如,建立专门的应急数据库,记录以往发生的突发事件及其对应的解决方案;定期更新应急数据库的内容,确保其包含最新的案例信息。
2. 加强车辆间协作
推动车联网技术的发展,促进车辆之间更加紧密的合作。例如,建立统一的标准协议,规范车辆间的通信方式;开发专门的应用程序,帮助车辆更好地进行信息交换和协同工作。
五、结论
尽管L5级自动驾驶面临着诸多技术瓶颈,但我们相信随着科技的进步和社会各界的支持,这些问题终将被克服。通过不断提升环境感知技术、改进路径规划算法以及优化决策执行系统,L5级自动驾驶有望在未来实现商业化应用,为人们带来更加安全、便捷的出行体验。















发表评论